Rotunda Laser Scan

Point Clouds: the Sullivant Rotunda Laser Scan Data
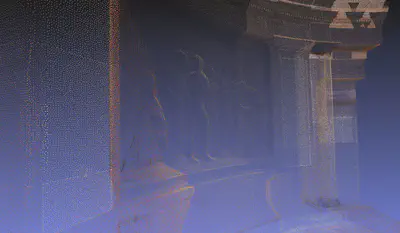
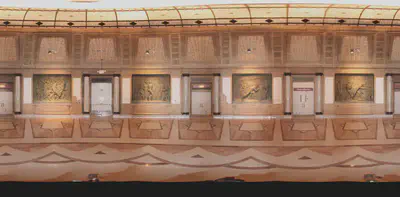
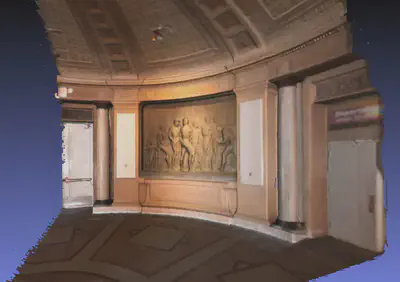
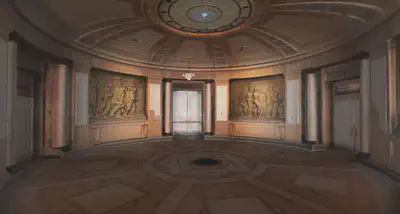
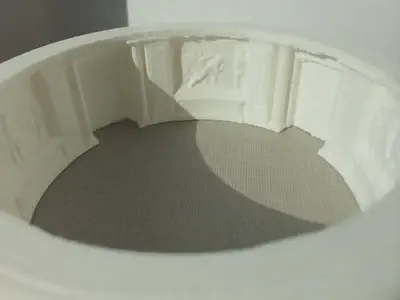
Fields such as architecture, construction, and civil engineering increasingly make use of very expensive laser scanners and software to generate large point clouds of data. A recent 3D scanning session of the rotunda in Sullivant hall containing complex wall sculptures produced 40 gigabytes of point and color data files (6 high resolution scans). Very recently it has become feasible to start producing point cloud data with less expensive equipment such as depth sensing and stereo cameras, as well as other photogrammetry techniques. Working with such point cloud data and its conversion to manageable geometry for 3D animation and virtual environments is unfamiliar territory for us. The rotunda scan is providing an opportunity to investigate pipelines and processes for integrating this sort of large scanned data into our current software environment.

An Ohio 3D Laser Scanning company was hired to scan the space with their high-end Leica HDS7000.
I was given the data as large PTS files to make it easy for me to work with, without needing to know/use Leica’s propriatary software. The data file contained all the points from six scans merged together. I wrote a simple Perl script to split the data into a number of smaller files so that I could load into my computer’s 8GB memory and work with it. The script also inserts a PLY header at the top of the file, since most of our software will read PLY (but none would read raw PTS).